자율행동체(AMM) 충전은 전력 전달을 넘어 장치 식별, 세션 수립·종료, 다중 기기 중재, 통신 단절 시 안전 수렴·복구까지 포함하는 운영 인터페이스 문제로 확장되고 있다. AMM의 이동성과 동시성 때문에 1:N/M:N 환경에서 요청 충돌과 혼잡이 빈번하며, 현장 장애는 효율보다 절차 해석 차이로 인한 상호운용성 불일치에서 주로 발생한다. 이번 기고는 국내 단체표준인 TTAK.KO-06.0638 Part 1~3을 기반으로 요구사항·아키텍처, 제어 프로토콜, 동기화·자율운영 핵심을 실제 산업계 통합 관점에서 정리하고 적용 방안을 제시한다[3].

글/ 고려대학교 주병권 교수님 연구실
주병권 (고려대학교 전기전자공학부 교수)
박용주 (한국전자기술연구원, 고려대학교 마이크로/나노시스템 협동 박사 과정)
김윤태 (한국전자기술연구원, 고려대학교 마이크로/나노시스템 협동 석사 과정)
목차
1. 서론
2. 문서 구조 개요: 자율행동체 접촉·무선충전 인터페이스 Part 1~3의 역할 분담
3. Part 1: 요구사항 및 시스템 아키텍처
3-1. 무선충전 송신기(PTU, Power Transmit Unit)/무선충전 수신기(PRU, Power Receive Unit)의 역할과 기능 경계
3-2. 토폴로지(1:1, 1:N, M:N) 관점의 요구사항
3-3. 제어와 데이터의 분리
4. Part 2: 충전 제어 통신 프로토콜
4-1. 제어 메시지의 큰 구성(공통 헤더 + 상태/결정 정보)
4-2. 세션 흐름(요청-결정-전송-종료)
4-3. 다수 기기 환경에서의 중재(대기/거절 표현의 표준화)
4-4. 오류와 복구(재시도 vs 재협상)
5. Part 3: 통신 동기화 및 운영 프로토콜
5-1. 네트워크 상태 모니터링(링크 품질 기반 운영)
5-2. 시간 동기화(Beacon 기반)
5-3. 핸드오버와 Fallback(이중화)
5-4. 공존성 및 간섭 완화
6. 국제 표준과의 정합성(범위·경계 관점)
7. 구현·통합 체크포인트(현장 중심)
8. 결론
9. 참고 문헌
1. 서론
무선전력전송(WPT)은 모바일 기기 중심의 소출력 적용을 넘어, 전기차·로봇·산업 설비 등 고가용·대출력 응용으로 확대되고 있다. 그러나 AMM 충전에서는 충전 가능 여부를 넘어, “충전이 운영 규칙에 따라 예측 가능하고 안전하게 수행되는가”가 더 중요한 성능 지표로 작용한다. AMM은 이동 중 작업/대기/충전이 반복되고, 다수 기기가 동일 구역에서 동시에 활동하기 때문에 충전이 곧 가동률(availability)과 직결된다 [1].
현장에서 반복되는 문제는 대개 전력전송부 자체보다 절차에서 발생한다. 예를 들어 (i) 동일 PTU에 대한 다수 PRU 동시 접근으로 인한 중재 실패, (ii) 통신 품질 저하/단절로 인한 세션 문맥 유실, (iii) 정렬(align) 상태 변화·이물질(FOD) 등으로 전력전송 조건이 급변할 때 안전한 종료·재개 실패, (iv) 이기종 무선 혼재 환경에서 링크 전환 과정의 제어 메시지 누락 등이 대표적이다 [3]. 이런 사건은 장치 자체는 정상이어도 “인터페이스 해석 불일치”만으로 재현되며, 제조사 조합이 늘어날수록 통합 비용과 운영 리스크가 비선형으로 증가한다 [5].
따라서 AMM 충전은 특정 구현을 강제하기보다, 장치와 인프라가 공유하는 최소 공통 규칙을 표준화하여 절차의 일관성을 확보할 필요가 있다. 이러한 관점에서 2025년 12월 제정된 국내 표준 TTAK.KO-06.0638 Part 1~3을 기반으로, 자율행동체의 무선전력전송 관련 표준을 분석·고찰하고자 한다 [4].
2. 문서 구조 개요: 자율행동체 접촉·무선충전 인터페이스 Part 1~3의 역할 분담
TTAK.KO-06.0638은 AMM 접촉·무선충전 인터페이스를 세 부분으로 나누어 다룬다. Part 1은 요구사항과 시스템 아키텍처를, Part 2는 충전 제어 통신 프로토콜을, Part 3은 통신 동기화 및 자율 운영 프로토콜을 정의한다. 이 구조의 장점은 “무엇이 필요하다(요구 사항)” → “어떻게 합의한다(제어 프로토콜)” → “끊겨도 어떻게 운영한다(동기화/운영)”의 흐름이 분리되어, 구현자가 설계를 추적 가능하게 만든다는 점이다.
현장 적용에서는 Part 간 연결이 중요하다. Part 1에서 정의한 토폴로지(1:1, 1:N, M:N)와 책임 경계가 Part 2의 세션·중재 메시지로 내려오고, Part 2의 타이밍·복구 규칙이 Part 3의 모니터링·핸드오버·Fallback과 결합해 운영 안정성을 만든다. 즉 Part 1은 설계의 전제, Part 2는 프로토콜의 뼈대, Part 3는 현장 생존성을 담당한다.
3. Part 1: 요구사항 및 시스템 아키텍처
3.1 무선충전 송신기(PTU, Power Transmit Unit)/무선충전 수신기(PRU, Power Receive Unit)의 역할과 기능 경계
Part 1은 AMM 충전 시스템을 기능적으로 분해하여 PTU(송신기)와 PRU(수신기)의 책임 경계를 제시한다. AMM 환경에서 PTU는 단순 송신기가 아니라, PRU 탐색/식별, 접속 관리, 충전 승인·거절·대기 처리, 상태 모니터링, 이상 감지, 이력 기록 등 운영 기능을 포함하는 “중재자”에 가깝다. PRU 역시 단순 수신기가 아니라 충전 요청, 상태 보고(배터리/정렬/안전), 세션 참여와 종료 요청, 오류 보고·재시도 같은 능동적 상호작용을 수행해야 한다.
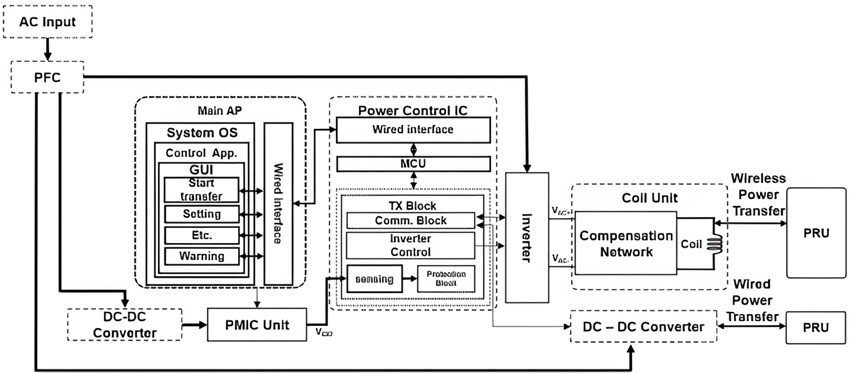
그림 1. PTU 하드웨어 기능 구성도
3.2 토폴로지(1:1, 1:N, M:N) 관점의 요구사항
요구사항 단계에서 토폴로지를 명시하는 이유는, 토폴로지에 따라 통신·운영 요구가 정량적으로 달라지기 때문이다. 1:1은 절차가 단순하지만, 1:N에서는 PTU가 동시 요청을 중재해야 하고, M:N에서는 혼잡·간섭·동시성 문제가 증가하여 링크 품질 모니터링과 공존성 전략이 필수다. 따라서 표준은 토폴로지별로 필요한 정보(식별자, 상태 보고 항목, 스케줄링 파라미터)와 운영 규칙(대기, 재시도, 종료 조건)을 구조적으로 고려하도록 유도한다.
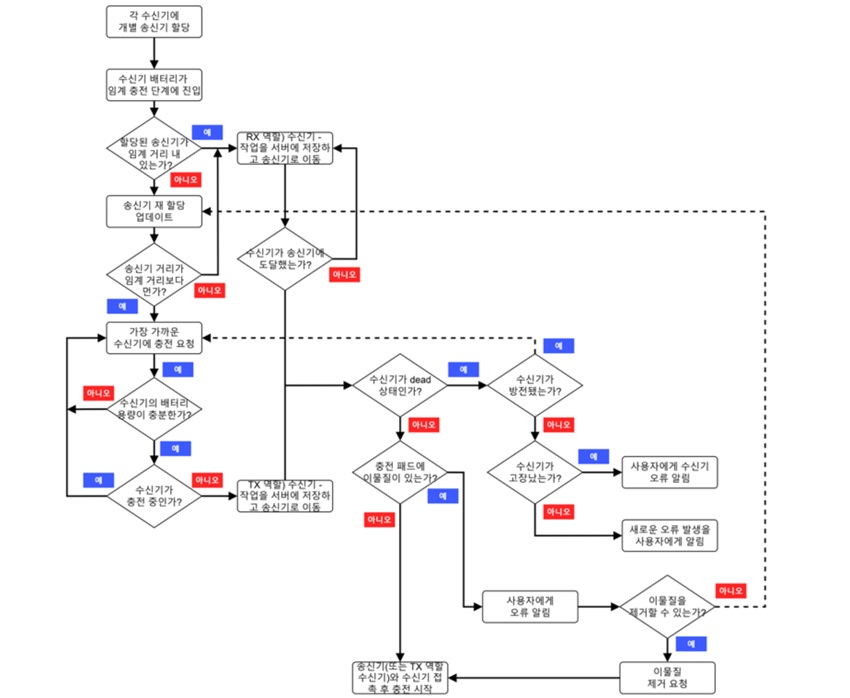
그림 2. 다수 충전기와 다수 자율행동체 연결 예시
3.3 제어와 데이터의 분리
Part 1은 통신을 제어(Control)와 데이터(Data)로 분리해 설계하도록 제시한다. 현장에서는 대역폭이 큰 데이터 트래픽이 존재하더라도, 충전 제어는 작은 메시지를 높은 신뢰도로 전달해야 한다. 따라서 데이터 채널이 혼잡해도 제어 채널이 유지되거나 대체될 수 있어야 하며, 이 요구는 Part 3의 다중 무선·이중화·Fallback 구조로 이어진다.
또한, 충전 제어를 상태 전이로 모델링하면 구현체 간 해석 불일치를 줄일 수 있다. 특히 통신 단절이나 정렬 이탈 같은 위험 조건에서는 “즉시 전력 차단과 안전 상태 수렴”이 우선되어야 하고, 복귀는 재협상 절차로 수행되도록 규칙화하는 것이 중요하다.
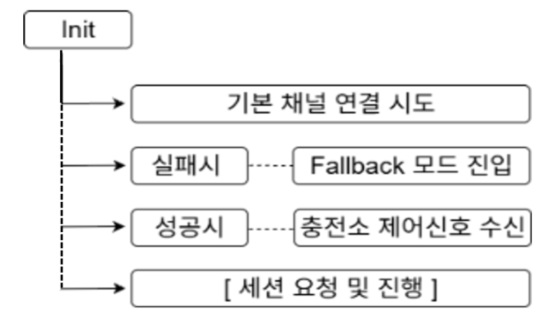
그림 3. 통신상태 전이도
4. Part 2: 충전 제어 통신 프로토콜
4.1 제어 메시지의 큰 구성(공통 헤더 + 상태/결정 정보)
Part 2는 충전 제어를 “메시지 나열”이 아니라 세션 기반 절차로 다룬다. AMM 현장에서 반복되는 문제는 메시지 필드가 부족해서가 아니라, 서로 다른 구현이 같은 상황을 다르게 해석하면서 생긴다. 따라서 Part 2의 목표는 기능을 과도하게 늘리기보다, 공통 절차를 고정해 상호운용성의 기준선을 제공하는 데 있다 [4].
충전 제어 메시지는 실무적으로 (1) 문맥을 식별하는 공통 헤더와 (2) 상태/결정 정보를 담는 페이로드로 나누어 보는 것이 편하다. 헤더에는 PRU/PTU 식별자, 세션 식별자, 메시지 유형, 순서/시간 정보가 포함되고, 페이로드에는 충전 요청, 승인/거절/대기, 상태 보고, 종료, 오류 같은 제어 의미가 담긴다. 확장 필드는 필요하지만, 상호운용성을 위해서는 “확장이 없어도 기본 동작이 유지”되는 방향이 유리하다. 옵션을 늘리기보다 필수 필드 의미를 흔들리지 않게 고정하는 것이 우선이다.
4.2 세션 흐름(요청-결정-전송-종료)
AMM 충전은 세션 단위로 이해하면 예외 처리가 단순해진다. 기본 흐름은 그림 4와 같이 정리된다.
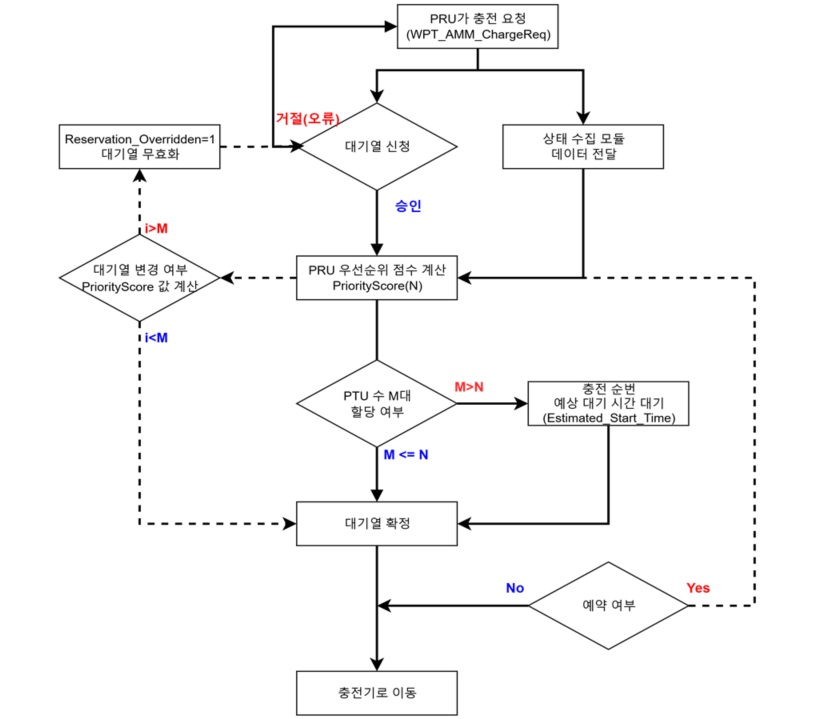
그림 4. 충전 절차 흐름도
여기서 핵심은 “승인 전 전력전송 금지”, “종료 사유 기록”, “단절 시 안전 수렴”처럼 행동 규칙이 일관되게 유지되는 것이다.
4.3 다수 기기 환경에서의 중재(대기/거절 표현의 표준화)
1:N 또는 M:N 환경에서는 PTU가 중재자 역할을 수행한다. 이때 표준이 중재 알고리즘 자체를 강제할 필요는 없지만, 중재 결과의 표현 방식은 공통화되어야 한다. 예를 들어 “대기(Queue)” 응답은 단순 거절과 달리, PRU가 불필요한 재시도를 반복하지 않도록 최소 안내 정보(대기 상태, 재시도 지연 또는 예상 시점 등)를 포함하는 편이 운영에 유리하다.
또한 공정성 관점에서 대기 시간이 과도하게 늘지 않도록, ‘최대 대기시간’과 같은 정책 파라미터를 운용 규칙으로 두는 방식이 현장 적용에 도움된다.
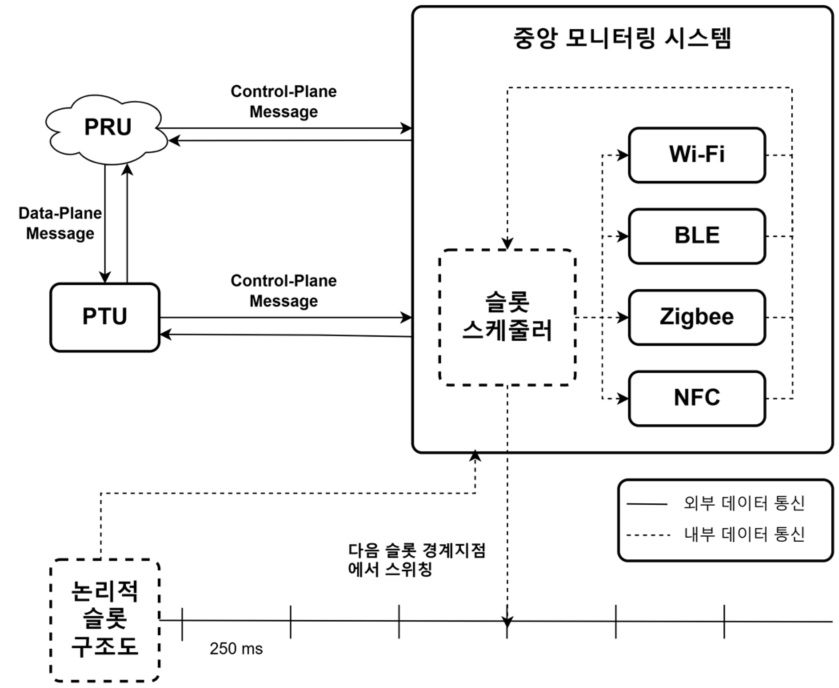
그림 5. 프레임 기반 통합 운용도
4.4 오류와 복구(재시도 vs 재협상)
현장에서는 통신 오류(지연/손실)와 안전 오류(과온/인터락, 정렬 급변 등)가 섞여 나타난다. 두 오류는 조치가 다르므로 절차도 구분되어야 한다. 일반적으로 재시도(retry)는 일시 통신 문제를 흡수하는 데 사용하고, 재협상(re-negotiate)은 세션 문맥이 깨졌거나 안전상 전력 차단 후 복귀가 필요한 경우에 적용하는 접근이 안정적이다.
또한 타임아웃/재전송/백오프는 링크 계층에만 의존하지 말고, 상위 절차에서 최소 규칙을 갖추는 편이 상호운용성에 유리하다. 혼잡 상황에서는 재시도 트래픽이 혼잡을 더 키울 수 있으므로, 일정 조건에서는 안전 종료 후 재협상으로 수렴시키는 설계가 필요하다.
5. Part 3: 통신 동기화 및 운영 프로토콜
5.1 네트워크 상태 모니터링(링크 품질 기반 운영)
Part 3는 “현장에서 끊겨도 시스템이 버티는 방식”을 정의한다. AMM 충전은 통신 품질 변동과 이동성을 전제로 하므로, 링크 품질 악화 시 전력전송을 어떻게 제한하고, 언제 링크를 전환하며, 전환 실패 시 어떻게 안전 수렴할지 같은 운영 규칙이 필요하다 [5].
링크 지표(RSSI, SNR, PER, 지연/지터 등)는 측정 자체보다, 지표 악화 시 무엇을 할지 결정 규칙이 핵심이다. 예를 들어 경고 단계에서 전력 제한, 위험 단계에서 링크 전환 시도, 전환 실패 시 세션 안전 종료 같은 절차를 운용 규칙으로 묶어야 한다. 또한 플래핑을 막기 위해 히스테리시스(악화/회복 임계 분리)와 지속 시간 조건을 두는 방식이 유효하다.
5.2 시간 동기화(Beacon 기반)
다수 PRU가 동시에 제어 메시지를 주고받는 환경에서는 동기화가 충돌을 줄이고 중재 결과를 예측 가능하게 만든다. Beacon 기반 타이밍 구조는 802.15.4 계열 슈퍼프레임 운용과 연결되는 개념으로 이해할 수 있으며, 실무에서는 가드 타임, 슬롯 길이, 재동기화 주기, 동기 오차 허용치 같은 파라미터가 중요해진다 [6].
5.3 핸드오버와 Fallback(이중화)
핸드오버는 무선을 바꾸는 행위 자체보다, 링크 전환 중에도 세션 상태·권한·파라미터가 유지되도록 보장하는 절차다. 구현 시에는 전환 중 안전 수렴(전력 제한/정지), 새 링크에서 재동기화, 세션 재검증, 정상 단계 복귀의 순서를 명확히 해야 한다 [5].
Fallback은 “대체 링크 존재”가 아니라 단절 상황에서 규칙적으로 수렴하고 복귀하는 운영 규칙 집합이다. 다중 무선 병렬 수신을 사용할 경우 중복 메시지/순서 역전이 발생할 수 있으므로, 시퀀스 기반 정렬, 중복 제거, 경로 우선순위, 전환 히스테리시스 같은 규칙을 함께 설계해야 한다.
5.4 공존성 및 간섭 완화
AMM 환경에서는 2.4 GHz 대역 혼재(BLE, 802.15.4 등)가 빈번할 수 있다. 공존성은 성능 최적화라기보다, 제어 채널의 지연 증가가 안전 수렴 지연으로 이어질 수 있다는 점에서 “운영 안전” 관점으로 접근해야 한다. 채널 계획(분리·블랙리스트), 제어 우선 트래픽 분리, 혼잡 시 백오프 정책 등이 대표적인 설계 포인트가 된다 [7].
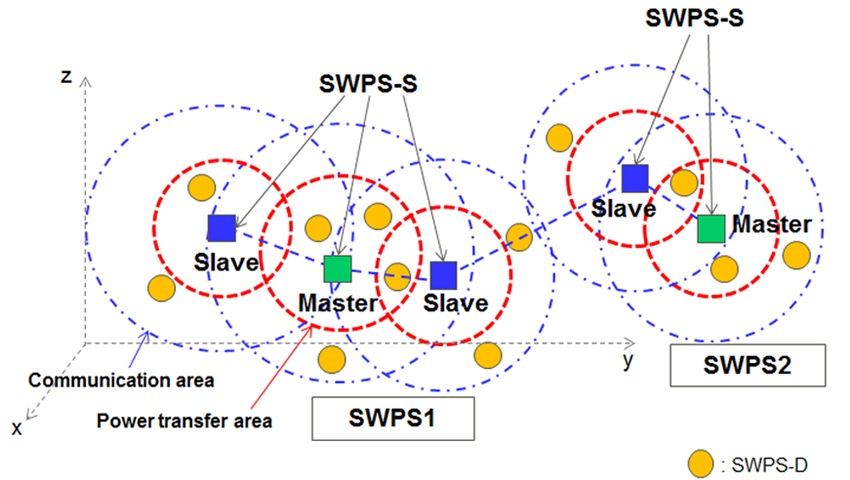
그림 6. IEC 62827-3에서 정의한 다중 송신기 환경의 무선전력전송 제어 개념(예시)
6. 국제 표준과의 정합성(범위·경계 관점)
AMM 표준은 EV WPT 표준과 동일 선상에서 “전력전송 프로파일”을 직접 규정하기보다, 다수 기기 운영·이동성·이기종 무선 혼재를 전제로 한 세션/중재/복구 절차를 강조한다는 점에서 범위가 다르다. 그러나 안전 이벤트 처리(위험 시 전력 차단 우선, 정렬/FOD 고려) 같은 기본 원칙은 EV WPT 표준 체계와 함께 검토할 가치가 있다 [2].
또한 상위 관리 시스템에서 충전기 상태/이력/가용성을 관리하는 경우에는 충전 인프라 관리 관점의 표준과 접점이 생긴다 [8]. 이때 AMM 제어 메시지/세션 정보는 감사 추적에 필요한 최소 정보(식별자, 시각, 이벤트 코드, 결과)를 포함하도록 설계하는 것이 운영 품질과 책임 분리에 도움된다.
7. 구현·통합 체크포인트(현장 중심)
표준을 적용하더라도 통합 단계에서 반복적으로 문제가 되는 지점은 대체로 비슷하다. 가장 먼저 정리해야 할 것은 식별자 체계다. PRU ID가 장치 고유 식별을 의미하는지, 아니면 현장 배치(라인/구역) 식별을 의미하는지부터 합의가 필요하다. PTU 역시 물리 장치 ID와 서비스 인스턴스(포트/채널) ID를 구분해 두어야 하며, 세션 ID는 중복 제거와 복구 절차의 기준이 되므로 유일성과 수명 규칙이 명확해야 한다. 이 ‘PRU-PTU-세션’의 3중 식별이 흐트러지면, 중재 결과가 일관되지 않게 나오기 쉽다 [4].
다음으로는 타이밍 파라미터가 상호운용성을 좌우한다. 동일한 메시지 구조를 사용하더라도 타임아웃 값이 다르면 한쪽은 종료로 판단하고, 다른 쪽은 재시도를 반복하면서 혼잡을 키우는 상황이 생긴다. 그래서 타임아웃·재전송·백오프 같은 시간 관련 규칙은 “링크가 알아서 해결”하도록 두기보다, 상호운용 프로파일로 고정해 시험에서 반복 검증하는 편이 안전하다.
마지막으로 운영 현장에서 가장 큰 차이를 만드는 것은 로그와 감사 추적이다. 패킷 캡처만으로는 상태기계 해석 차이를 분리하기 어렵기 때문에, 최소한 상태 전이 이벤트(시작/전송/종료/오류), 중재 결과(대기/거절 사유), 링크 품질 변화와 전환 트리거, 전력 차단/복귀 시점을 일관된 코드 체계로 기록해야 한다. 그래야 장애 재현성이 확보되고, 벤더 간 책임 분리도 가능해진다.
8. 결론
자율행동체 무선충전은 전력전송 기술만으로 완성되지 않으며, 다수 기기·이동성·통신 변동성을 전제로 한 “제어/운영 절차”의 표준화가 핵심이다. TTAK.KO-06.0638 Part 1~3은 요구사항-제어 프로토콜-동기화/운영으로 계층을 분리하여 구현과 통합 단계에서 추적 가능한 기준을 제공한다. 실무 적용에서는 표준 내용을 단순 요약하기보다, ID/세션/중재/타이밍/핸드오버/Fallback/공존성 같은 결정 포인트를 현장 파라미터로 구체화하고, 상호운용 시험 항목과 함께 운용함으로써 운영 리스크를 줄일 수 있다.
9. 참고 문헌
[1] IEC, IEC 61980-1:2020, “Electric vehicle wireless power transfer (WPT) systems – Part 1: General requirements,” Nov. 2020.
[2] SAE International, SAE J2954_202408, “Wireless Power Transfer for Light-Duty Plug in/Electric Vehicles Methodology,” Aug. 2024. and Alignment
[3] TTA, TTAK.KO-06.0638-Part1, “자율행동체 접촉·무선충전 인터페이스 – 제1부: 주요 요구사항 (Contact/wireless Charging Interfacing for Autonomous Moving Machines – Part 1: Main Requirements),” Dec. 5, 2025.
[4] TTA, TTAK.KO-06.0638-Part2, “자율행동체 접촉·무선충전 인터페이스 – 제2부: 통신 프로토콜 (Contact/wireless Charging Interfacing for Autonomous Moving Machines – Part 2: Communication Protocol),” Dec. 5, 2025.
[5] TTA, TTAK.KO-06.0638-Part3, “자율행동체 접촉·무선충전 인터페이스 – 제3부: 통신 동기화 및 운영 프로토콜 (Contact/wireless Charging Interfacing for Autonomous Moving Machines – Part 3: Communication Synchronization and Operational Protocols),” Dec. 5, 2025.
[6] IEEE, IEEE Std 802.15.4-2020, “IEEE Standard for Low-Rate Wireless Networks,” Jul. 23, 2020.
[7] Bluetooth SIG, “Bluetooth Specification,” ver. 5.4, Feb. 7, 2023. Core
[8] IEC, IEC 63110-1:2022, “Protocol for management of electric vehicles charging and discharging infrastructures – Part 1: Basic definitions, use cases and architectures,” Jul. 2022.
[9] ISO, ISO 15118-20:2022, “Road vehicles — Vehicle to grid communication interface — Part 20: 2nd generation network layer and application layer requirements,” Apr. 2022.
[10] LoRa Alliance, TS001-1.0.4, “LoRaWAN® L2 1.0.4 Specification,” Sep. 28, 2023.
[11] Wireless Power Consortium, “Qi Specification,” ver. 2.2.1, Jul. 2025.
[12] IEC, IEC 62827-1:2016, “Wireless power transfer – Management – Part 1: Common components,” 2016.
[13] IEC, IEC 62827-2:2017, “Wireless power transfer – Management – Part 2: Multiple device control management,” 2017.
[14] IEC, IEC 62827-3:2016, “Wireless power transfer – Management – Part 3: Multiple source control management,” 2016.
[15] IEC, IEC TR 62869:2013, “Activities and considerations related to wireless power transfer (WPT) for audio, video and multimedia systems and equipment,” 2013.
[16] IEC, IEC 62980:2022, “Parasitic communication protocol for radio-frequency
wireless power transmission,” 2022.
[17] IEC, IEC TR 63239:2020, “Radio frequency beam wireless power transfer (WPT) for mobile devices,” 2020.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>